Learning ROS. Part 3
Using ROS launch file
As in the part 2 of this learning process, i created simple video streaming using ROS. But openning terminal for each node is very time-consuming and unconvinient. ROS provides a mechanism to start master node and other nodes at once, which call ros launch file. In this post, i’ll go through process of creating simple launch file for the last tut3
Source code is at github.
Create workspace
Our workspace is as follow.
# we need to copy tut3 directory into tut4
# and edit settings of CMakeLists.txt and package.xml
ROS-tutorial/src/tut4
├── include
├── launch
│ └── run_tut4.launch <-- 1. launch file
└── src <-- 2. source code, no-change
├── Camera_Node.cpp
├── Img_Display_Node.cpp
└── Img_Process_Node.cpp
├── CMakeLists.txt
├── package.xml
Remember to change the following lines after copying or the build will failed.
# CMakeLists.txt
project(tut4)
add_executable(tut4_Camera_Node src/Camera_Node.cpp)
target_link_libraries(tut4_Camera_Node ${catkin_LIBRARIES} ${OpenCV_LIBS})
add_executable(tut4_Img_Process_Node src/Img_Process_Node.cpp)
target_link_libraries(tut4_Img_Process_Node ${catkin_LIBRARIES} ${OpenCV_LIBS})
add_executable(tut4_Img_Display_Node src/Img_Display_Node.cpp)
target_link_libraries(tut4_Img_Display_Node ${catkin_LIBRARIES} ${OpenCV_LIBS})
# package.xml
<name>tut4</name>
<version>0.0.0</version>
<description>The tut4 package</description>
Grammar of launch file
Launch file uses xml syntax. List a syntax and meaning is as follow. See roslaunch xml for more detail
<launch>
<!-- we can include file from other package -->
<include file="$(find package)/xxx.launch"/>
<!-- launch file arguments : ??? -->
<arg
name="test1"
default="0"
/>
<!-- group = collection of node; have ns=namespace -->
<group ns="group_name" if="$(arg test1)">
<param name="huey" value="red" comment="parameter of group"/>
<node
pkg="package_name"
type="executable_name"
name="node_name" comment="node will use this name, override ros::init"
output="screen" comment="direct output to terminal, not useful"
respawn="true" comment="respawn process when fail"
required="true" comment="this node is must have"
comment="respawn+required can not both set to true"
launch-prefix="xterm -e" comment="launch command prefix, use xterm -e to open separated windows, very useufl"
>
<!-- rename the topics that node publish/subcribe to -->
<remap from="original_name" to="new_name"/>
<param name="huey" value="red" comment="parameter of node"/>
</node>
<group/>
</launch>
Write simple launch file
Our launch file is as follow. Remember that launch file have to be put inside launch directory or ROS will not run correctly.
<launch>
<group ns="tut4">
<node
pkg="tut4"
type="tut4_Camera_Node"
name="Camera_Node"
launch-prefix="xterm -e"
>
</node>
<node
pkg="tut4"
type="tut4_Img_Display_Node"
name="Img_Display_Node"
launch-prefix="xterm -e"
>
</node>
<node
pkg="tut4"
type="tut4_Img_Process_Node"
name="Img_Process_Node"
launch-prefix="xterm -e"
>
</node>
</group>
</launch>
Note: the launch file above will open new terminal window for each node. If we want to open only 1 new window, and add node’s console into that window’s tab, we should use tmux. This is out of this post’s scope.
Run launch file
ROS use the roslaunch command to execute launch file. Detail is at roslaunch. In our case the command is as follow.
# Remember to rebuild the package
catkin_make
source devel/setup.bash
# roslaunch package-name launch-file-name.launch
# add -v to roslaunch for verbosing
roslaunch tut4 run_tut4.launch
After run launch file, the console/terminal output is as follow.
(base) gachiemchiep@Home:~/workspace/github/ROS-tutorial$ roslaunch tut4 run_tut4.launch
... logging to /home/gachiemchiep/.ros/log/1a490b32-6faa-11e9-8a4d-207918e2c14c/roslaunch-Home-24486.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://Home:43529/
SUMMARY
========
PARAMETERS
* /rosdistro: melodic
* /rosversion: 1.14.3
NODES
/tut4/
Camera_Node (tut4/tut4_Camera_Node)
Img_Display_Node (tut4/tut4_Img_Display_Node)
Img_Process_Node (tut4/tut4_Img_Process_Node)
auto-starting new master
process[master]: started with pid [24496]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 1a490b32-6faa-11e9-8a4d-207918e2c14c
process[rosout-1]: started with pid [24507]
started core service [/rosout]
process[tut4/Camera_Node-2]: started with pid [24510]
process[tut4/Img_Display_Node-3]: started with pid [24514]
process[tut4/Img_Process_Node-4]: started with pid [24523]
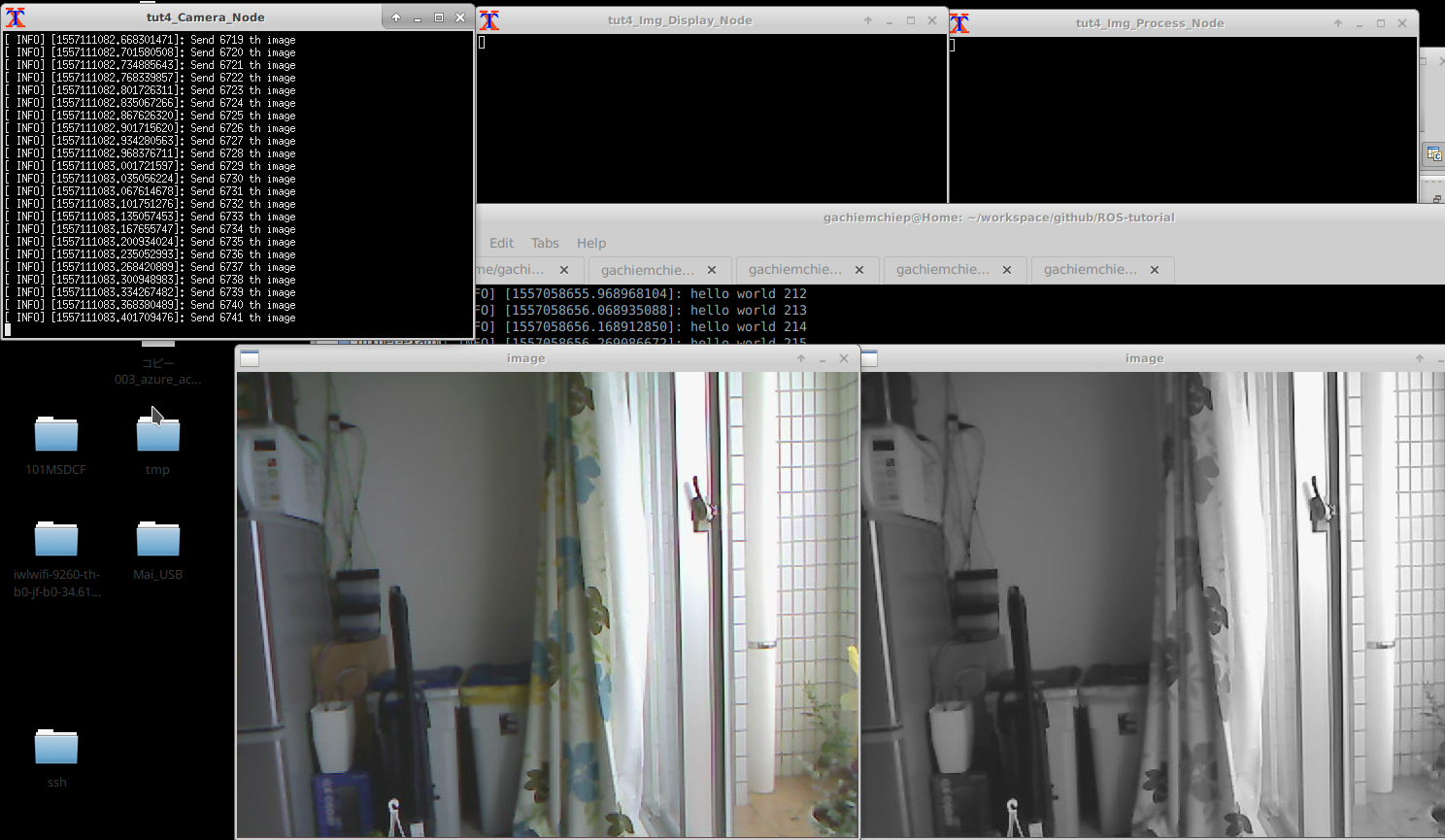
Inside our launch file, we use the launch-prefix=”xterm -e” to open new terminal for each node. So after executing, 3 new terminal will be opened as follow picture.
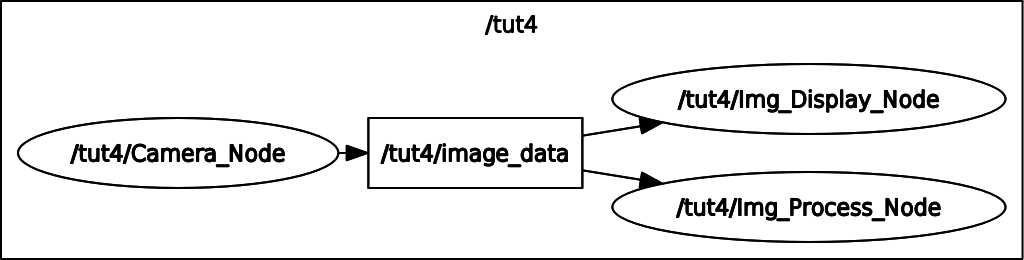
The rqt_graph is as follow. Please notice the tut4 rectangle. This mean 3 nodes Camera_Node , Img_Display_Node, Img_Process_Node and img_data topic are inside tut4 namespace. When display node’s name, rqt_graph will append the tut4 in front of each node and topics name.
We use the Ctrl+C shortcut to shutdown execution of launch file.
^C
[tut4/Img_Process_Node-4] killing on exit
[tut4/Img_Display_Node-3] killing on exit
[tut4/Camera_Node-2] killing on exit
[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
done
Reference
以上
Leave a comment