Camera calibration
What is Camera Calibration?
Geometric camera calibration, estimates the parameters of a lens and image sensor of an image or video camera. These parameters include intrinsics, extrinsics and distortion coefficients
The relation between intrinsics and extrinsics can be described as follows.
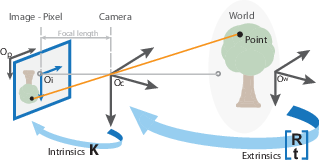
Fig: Camera intrinsics and extrinsics relate (1) (Source: mathwork) In a short-word: extrinsics parameters help us turn world coordinates into camera coordinates. And intrinsic parameters help us turn camera coordinates into pixel coordinate
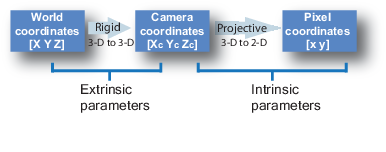 Fig: Camera intrinsics and extrinsics relate (2) (Source: mathwork)
Fig: Camera intrinsics and extrinsics relate (2) (Source: mathwork)
Example of Distortion
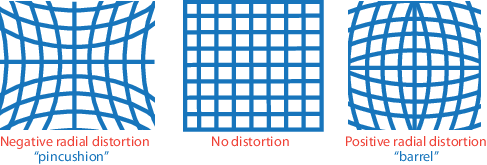 Fig: Radial Distortion (Source: mathwork)
Fig: Radial Distortion (Source: mathwork)
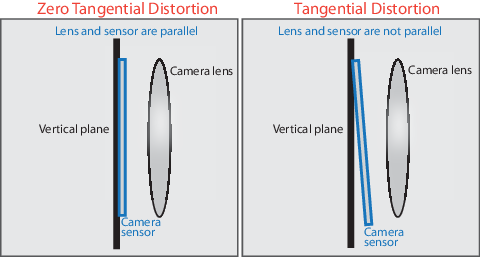 Fig: Tangential Distortion (Source: mathwork)
Fig: Tangential Distortion (Source: mathwork)
Camera Projection
Camera projection = convert 3d point (X, Y, Z) into camera’s pixel coordinate (x, y)
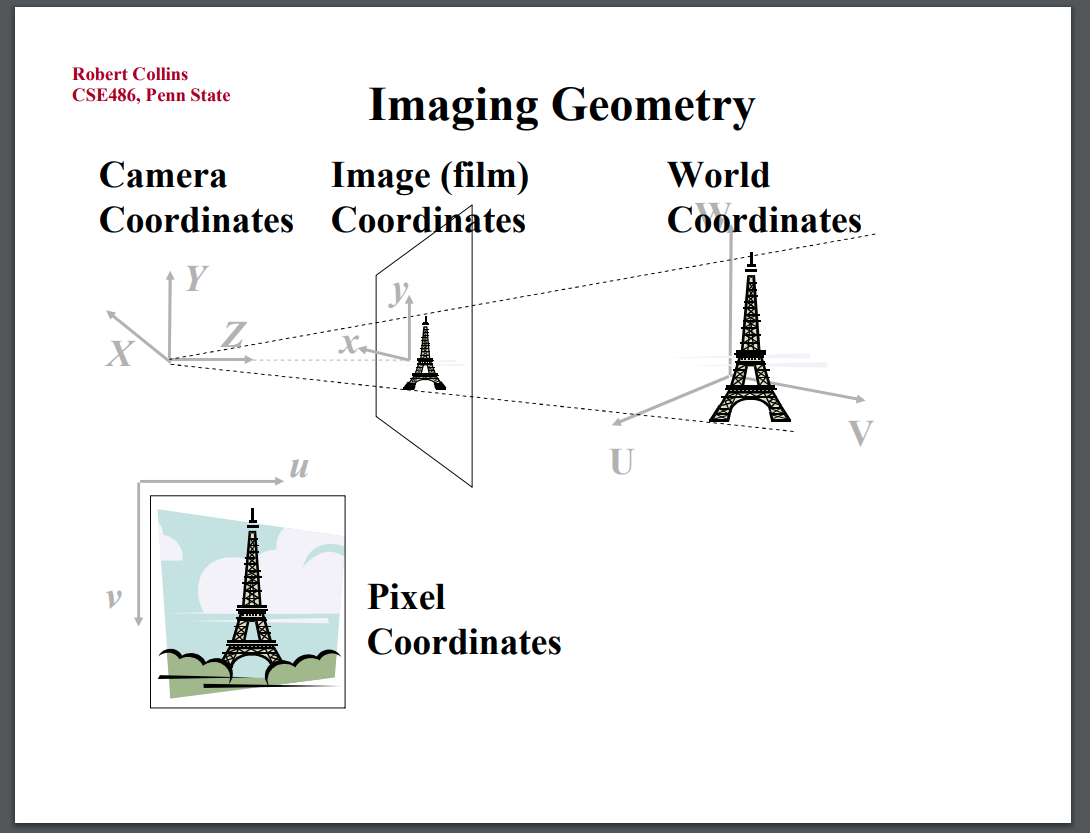
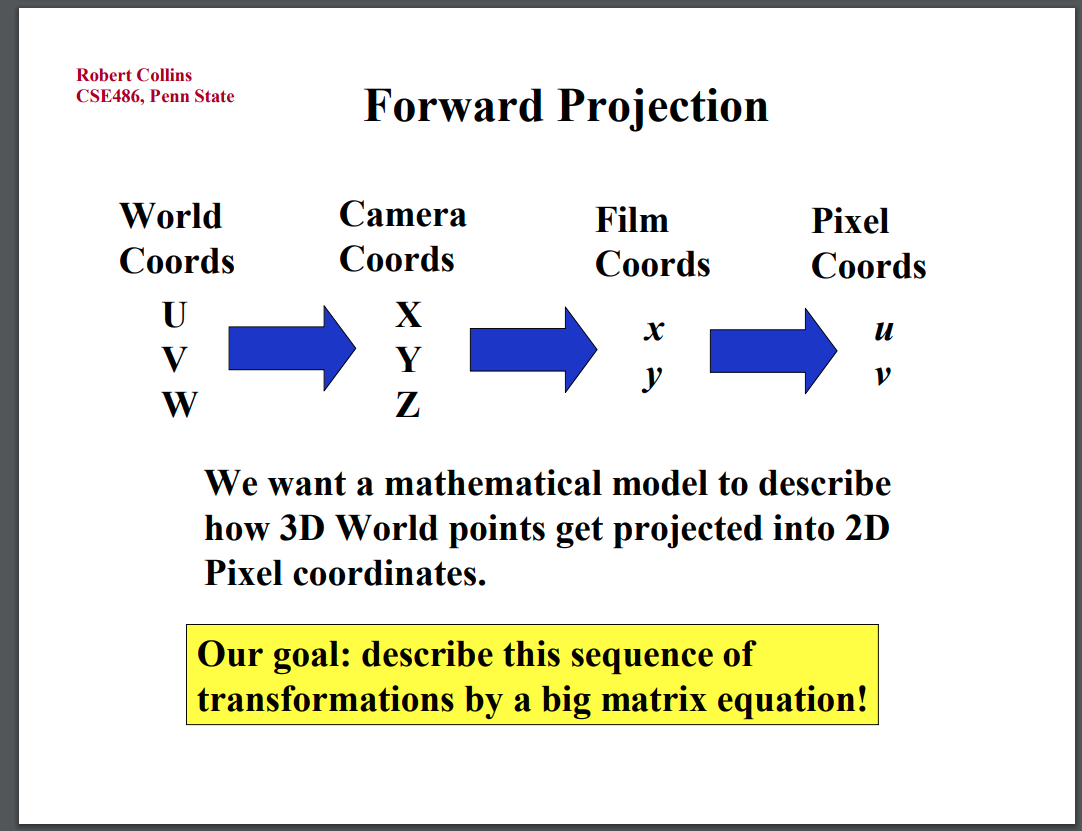
Forward projection == convert World coords into pixel coords.
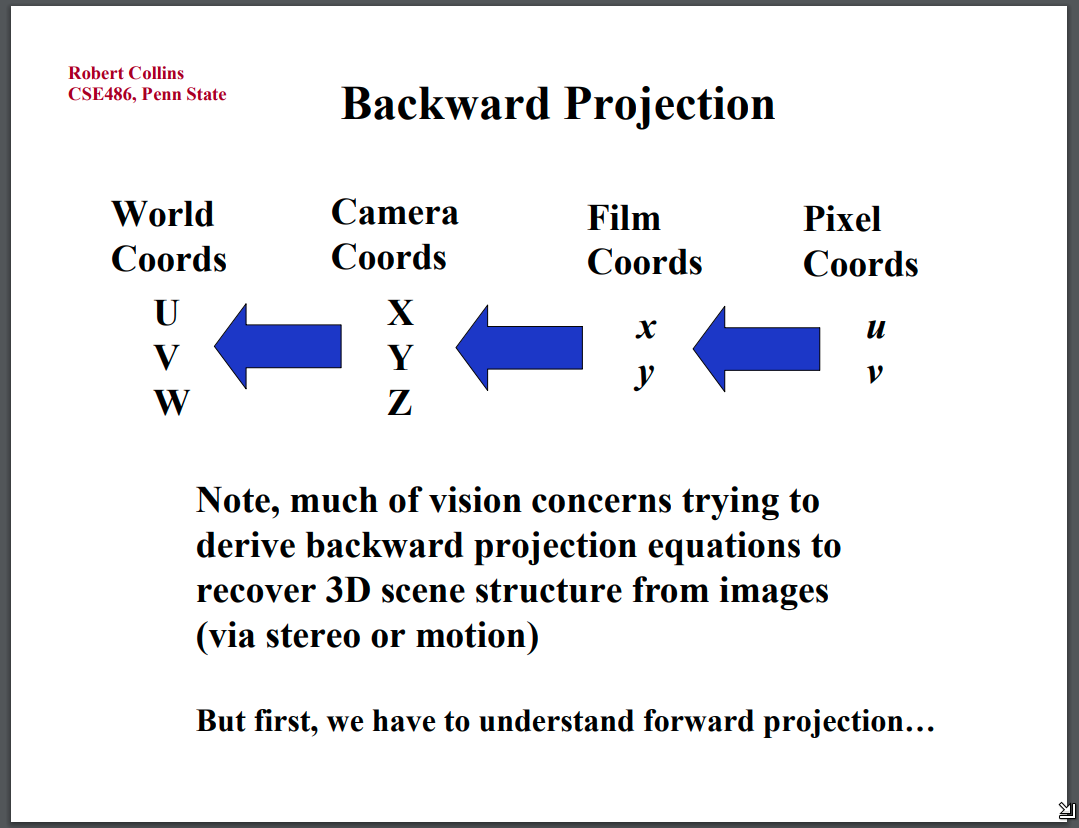
Backward projection = convert pixel coords into world coords
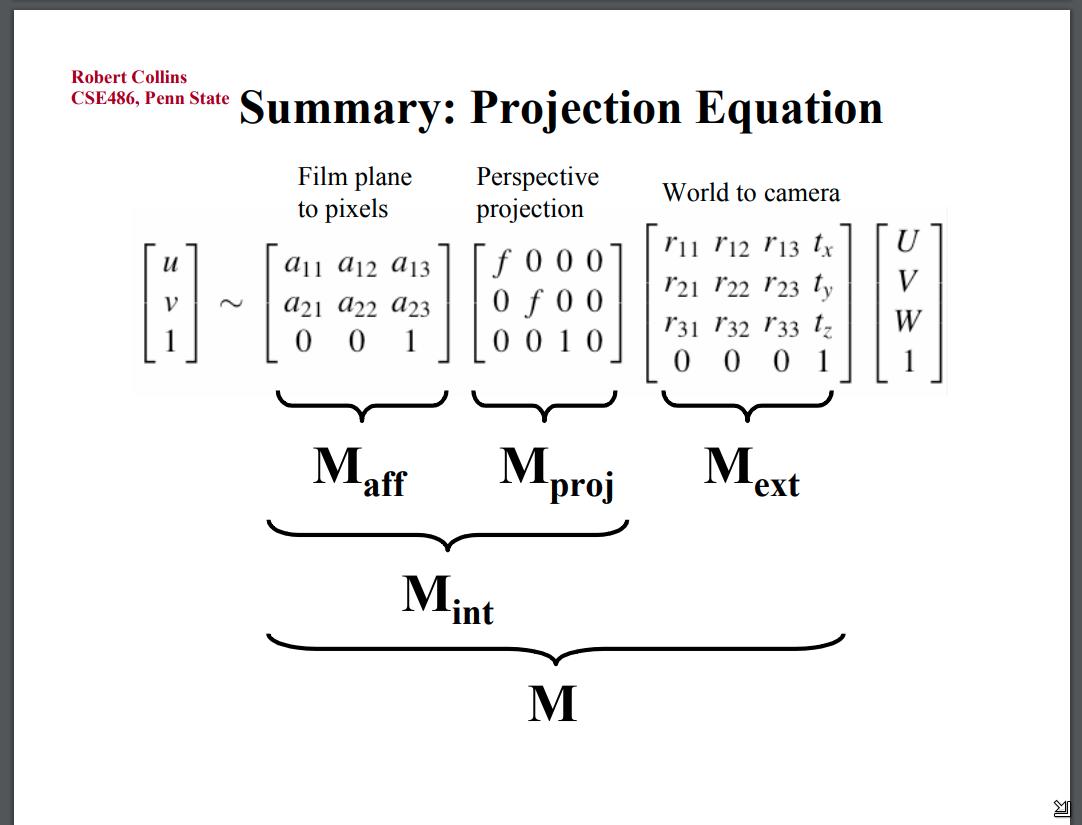
The relation between foward projection and extrinsics (Mext) and extrinsics (Mint)
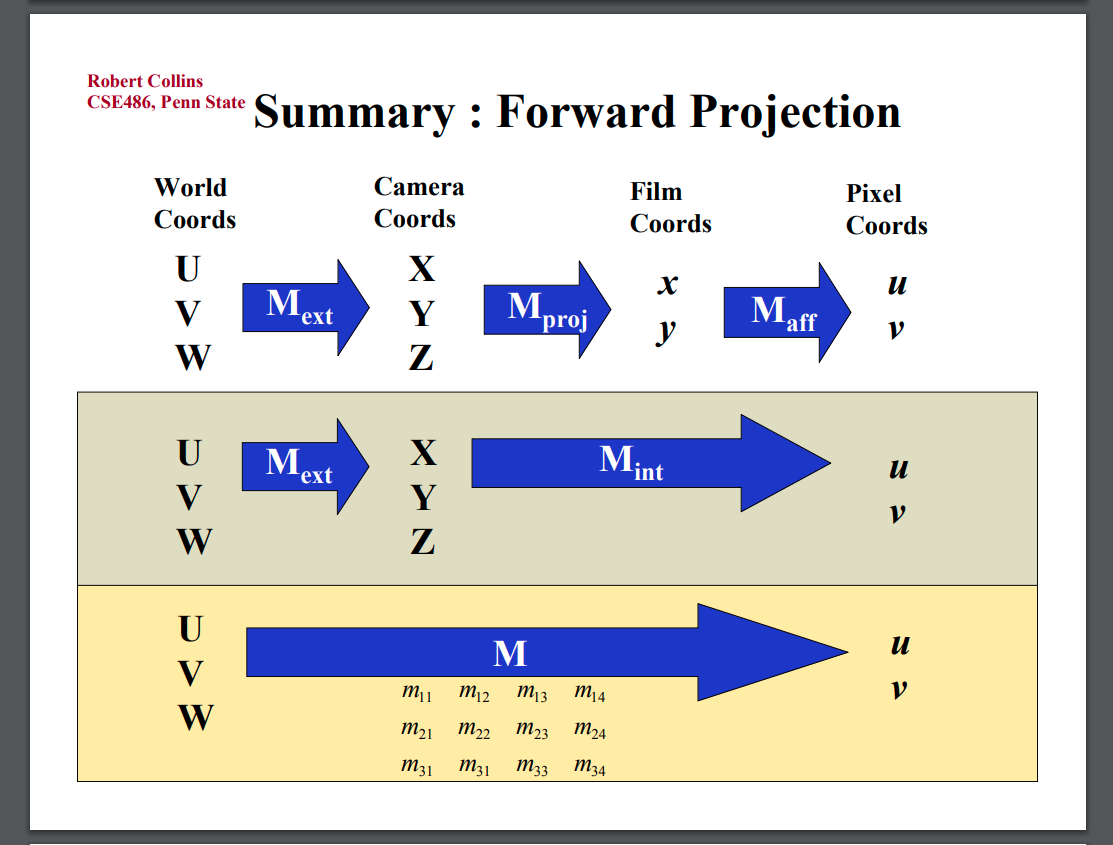
In matrix manipulation format
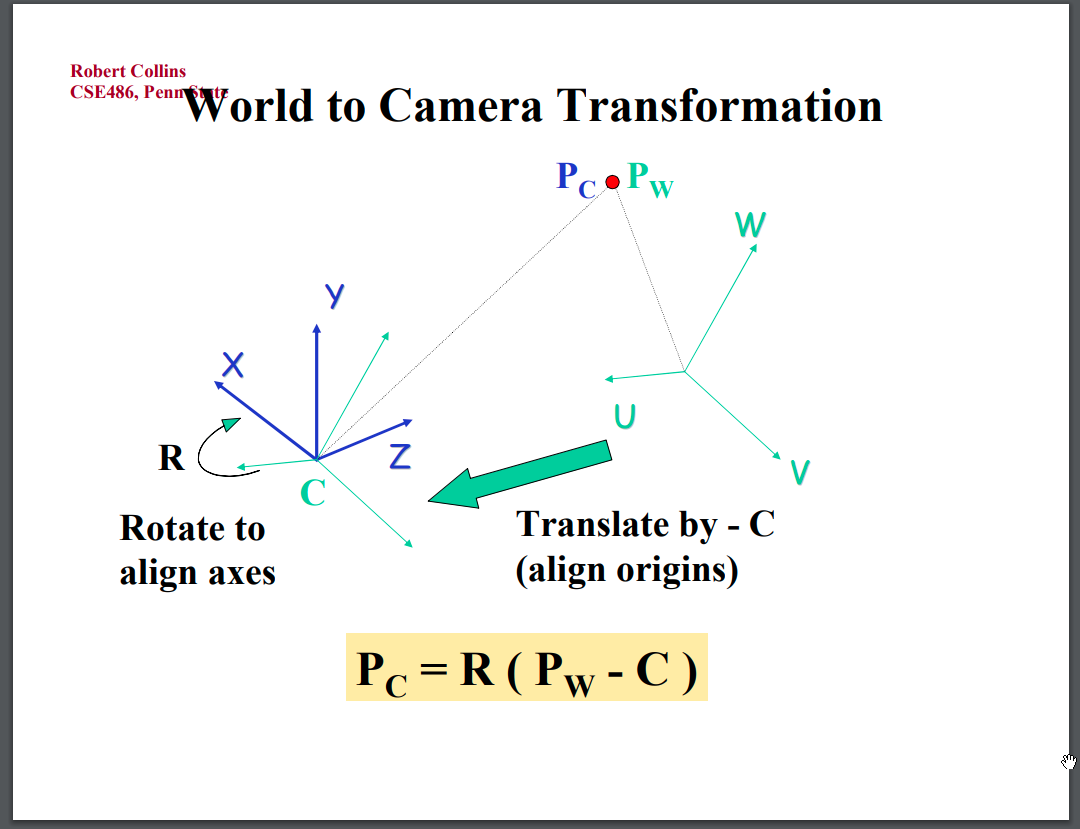
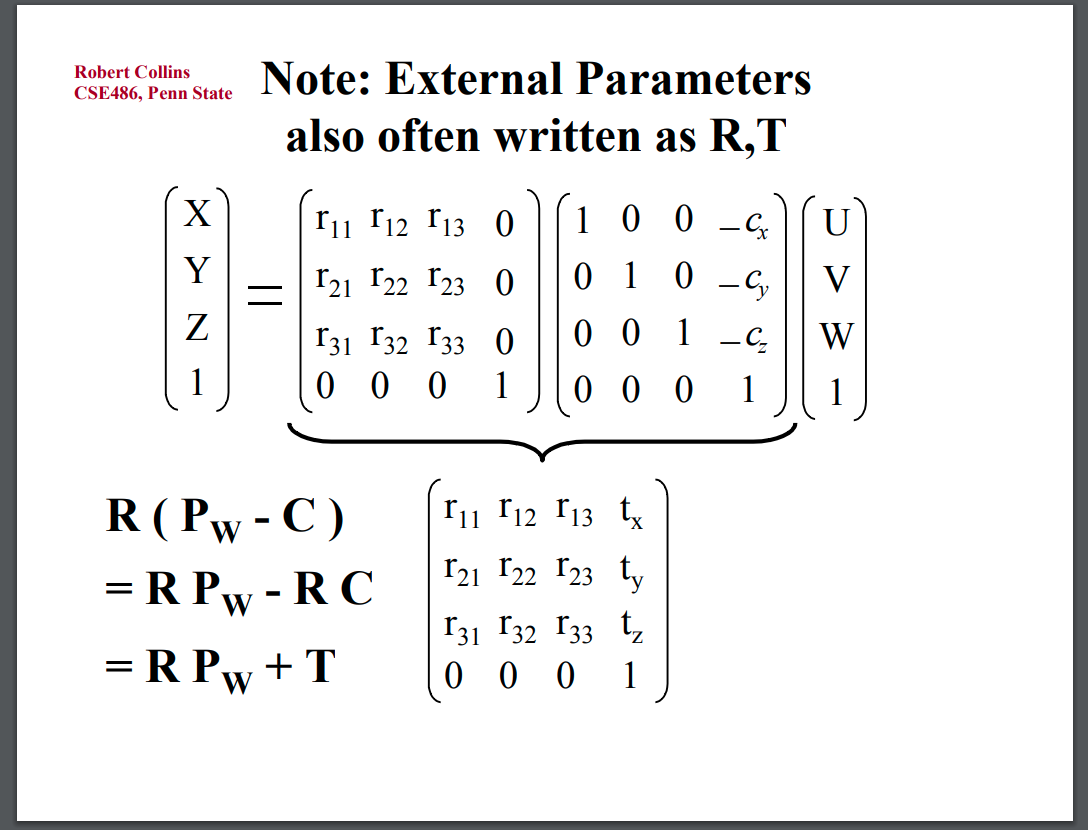
Camera extrinsics
The extrinsics is the result of a rotation and a translation
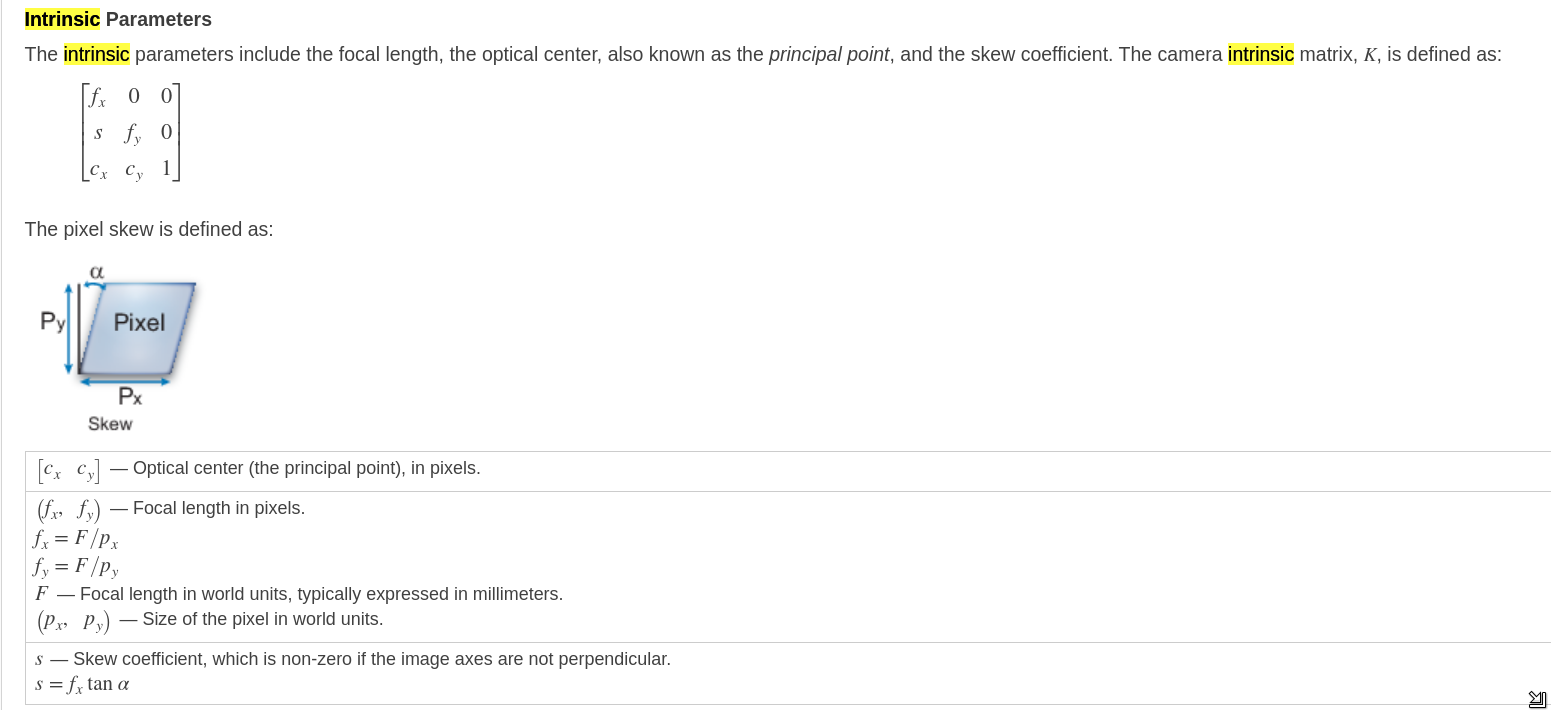
Camera intrinsics
The intrinsics is the result of a affine Transformation (Maff) and a perspective projection
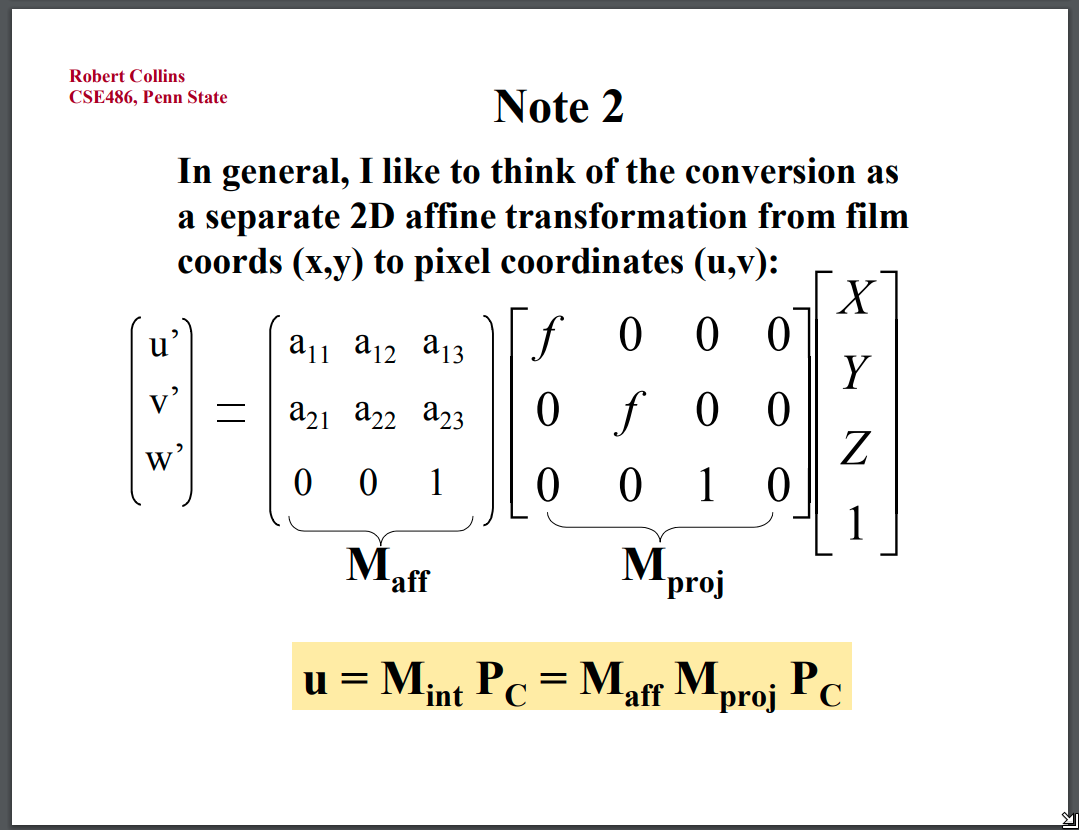
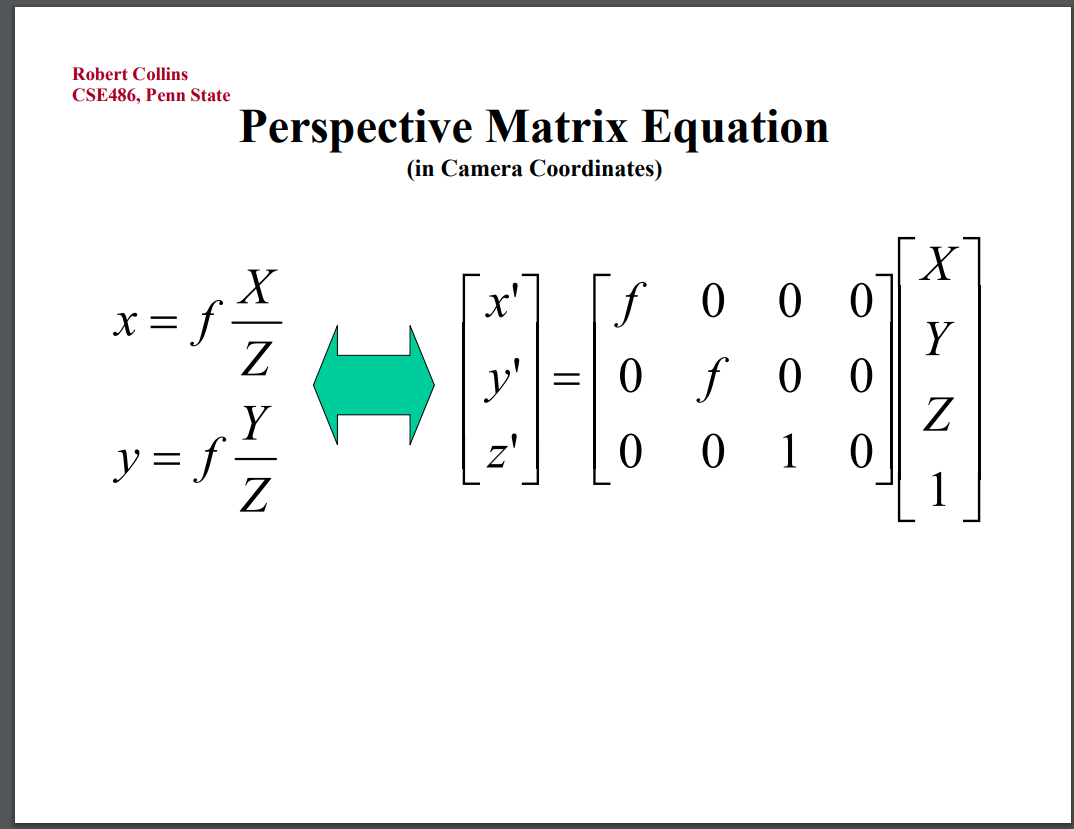
The perspective projection
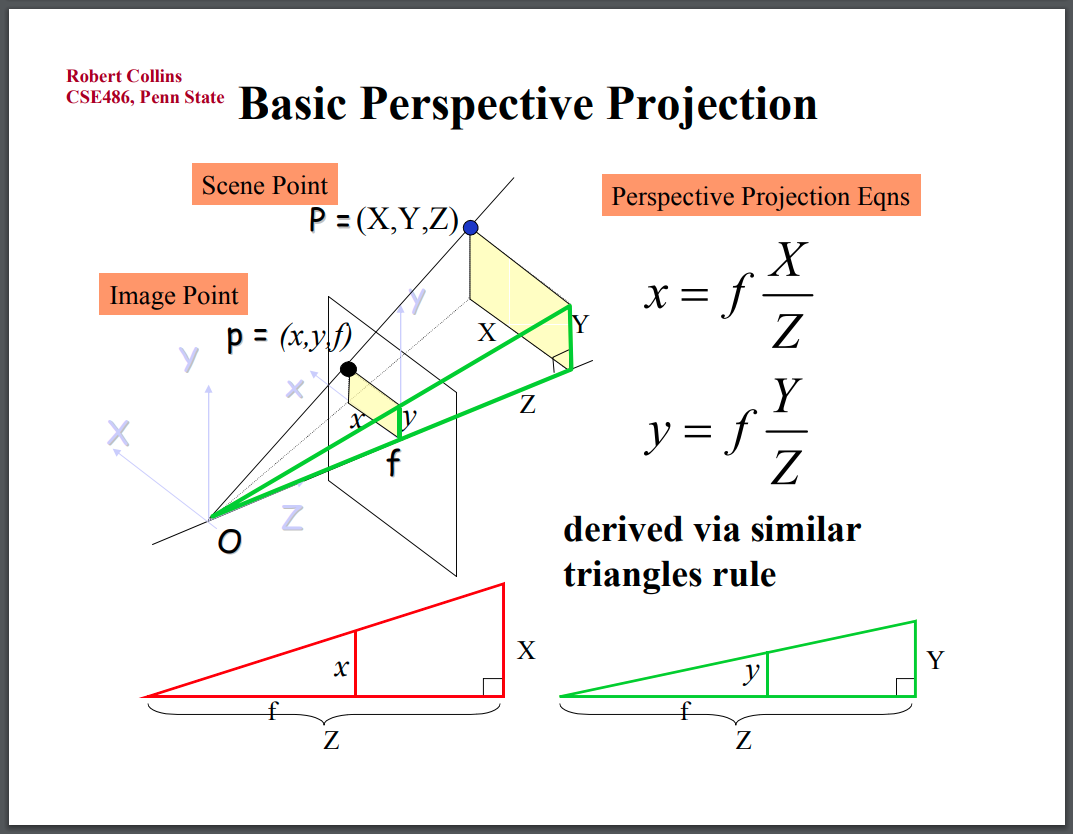
Re-write in matrix manipulation
The affine Transformation
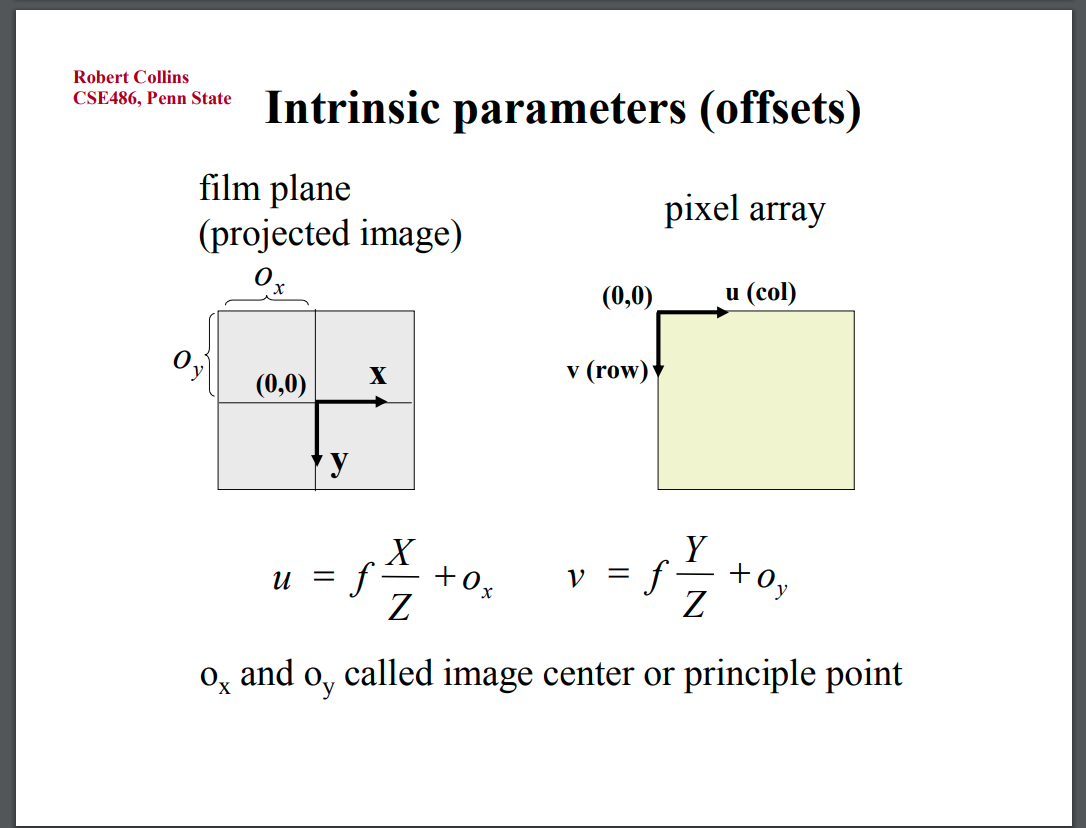
The camera intrinsics is a 3x3 matrix as follow
Camera Projection implementation
These code are taken from intel realsensen source code. For detail see https://github.com/IntelRealSense/librealsense/blob/master/include/librealsense2/rsutil.h
This is only used for check the matrix manipulation in above section
Camera extrinsics
typedef struct rs2_extrinsics
{
float rotation[9]; /**< Column-major 3x3 rotation matrix */
float translation[3]; /**< Three-element translation vector, in meters */
} rs2_extrinsics;
Camera intrinsics
typedef struct rs2_intrinsics
{
int width; /**< Width of the image in pixels */
int height; /**< Height of the image in pixels */
float ppx; /**< Horizontal coordinate of the principal point of the image, as a pixel offset from the left edge */
float ppy; /**< Vertical coordinate of the principal point of the image, as a pixel offset from the top edge */
float fx; /**< Focal length of the image plane, as a multiple of pixel width */
float fy; /**< Focal length of the image plane, as a multiple of pixel height */
rs2_distortion model; /**< Distortion model of the image */
float coeffs[5]; /**< Distortion coefficients */
} rs2_intrinsics;
or inside Ros’s senser_msgs. Please be noted that matlab use different format with ros.
# Intrinsic camera matrix for the raw (distorted) images.
# [fx 0 cx]
# K = [ 0 fy cy]
# [ 0 0 1]
# Projects 3D points in the camera coordinate frame to 2D pixel
# coordinates using the focal lengths (fx, fy) and principal point
# (cx, cy).
float64[9] K # 3x3 row-major matrix
Camera projection
Pixel coords into Camera Coords
static void rs2_deproject_pixel_to_point(float point[3], const struct rs2_intrinsics * intrin, const float pixel[2], float depth)
Camera Coords into Pixel coords
static void rs2_project_point_to_pixel(float pixel[2], const struct rs2_intrinsics * intrin, const float point[3])
Camera 1 Coords -> World Coords -> Camera 2 Coords
static void rs2_transform_point_to_point(float to_point[3], const struct rs2_extrinsics * extrin, const float from_point[3])
Reference
- https://www.scratchapixel.com/lessons/3d-basic-rendering/computing-pixel-coordinates-of-3d-point/perspective-projection
- Camera Projection
- Camera Projection 2
- ros information
- https://github.com/IntelRealSense/librealsense/blob/master/include/librealsense2/rsutil.h
- Realsense Projection-in-RealSense-SDK-2.0
End
Leave a comment